প্রোগ্রামের সারসংক্ষেপ
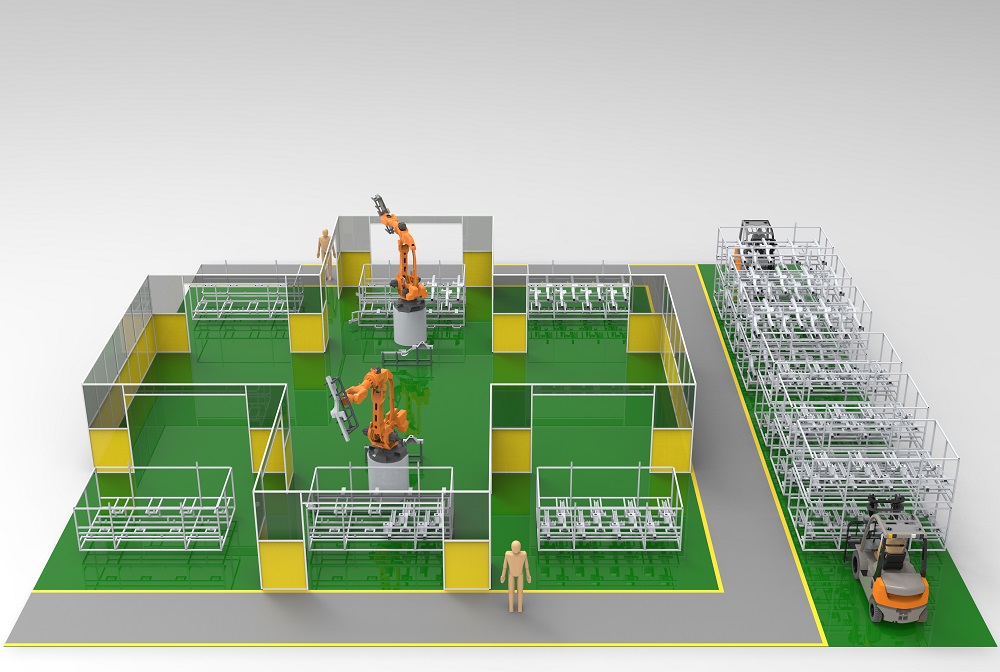
উৎপাদন লাইনের প্রধান কাজ: গাড়ির সামনের রেল ক্র্যাশযোগ্যতা এবং চাকা আবরণ সমাবেশ উৎপাদন লাইন।
অ্যাসেম্বলি প্রক্রিয়া: যন্ত্রাংশের গাড়িটিকে অবস্থানে নিয়ে পরীক্ষা করুন——রোবট যন্ত্রাংশটি স্থাপন করুন——HY1165A-290 যন্ত্রাংশগুলি ধরে যন্ত্রাংশের গাড়িতে রাখুন——পার্কিং স্পেস পূর্ণ হয়ে গেলে, কর্মীদের যন্ত্রাংশগুলি প্রতিস্থাপন করতে বলুন।
প্রকল্পটিতে HY1165A-290 এর 2 সেট, 2 সেট পার্কিং স্পেস, 2 সেট গ্রিপ এবং অন্যান্য প্রতিষ্ঠান রয়েছে।
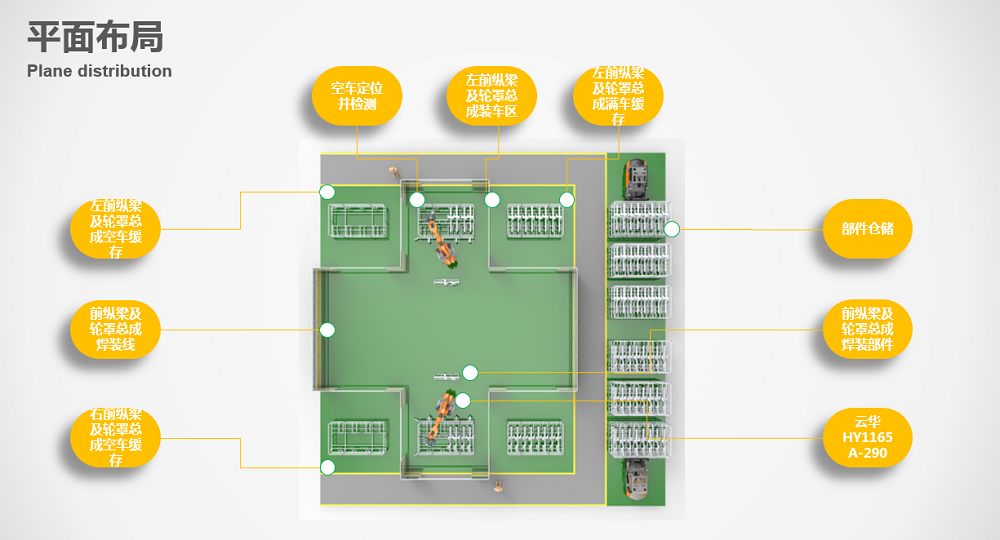
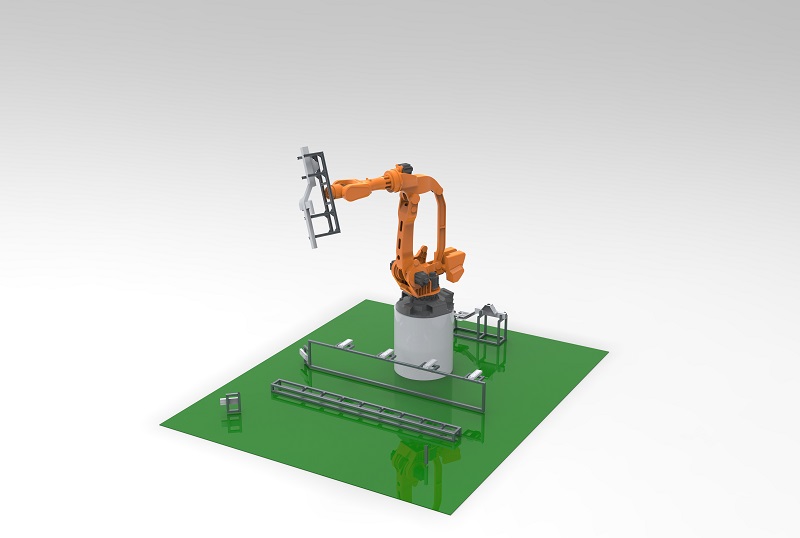
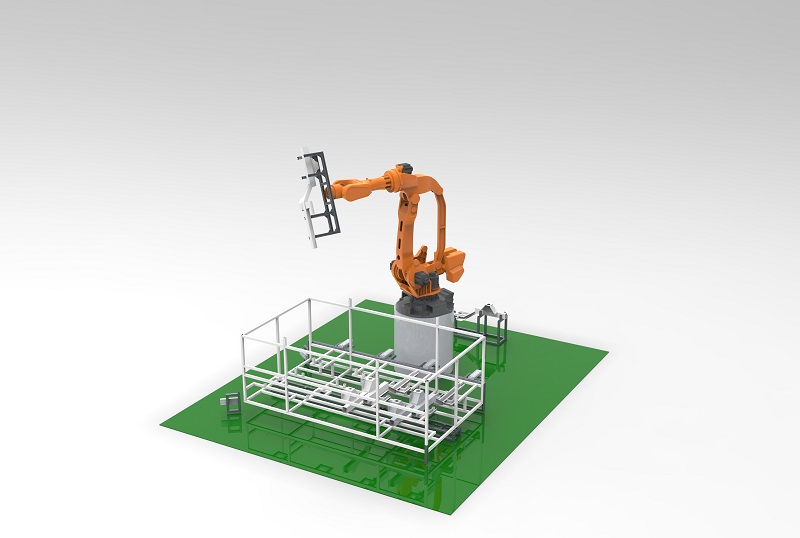
ওয়ার্কস্টেশন নিরাপত্তা সুরক্ষা, উপাদান স্থাপনের কার্যকারিতা সনাক্তকরণ, গ্র্যাপ কার্যকারিতা সনাক্তকরণ, খালি পার্কিং স্থান সনাক্তকরণ।
কম্পোনেন্ট গাড়ির অবস্থান নির্ধারণ এবং সনাক্তকরণ, কম্পোনেন্ট গাড়ির দ্বিতীয় তলার উপাদান র্যাক নিয়ন্ত্রণ, খালি এবং পূর্ণ গাড়ি নিয়ন্ত্রণ।



