অর্থনৈতিক ও সামাজিক উন্নয়নের জন্য শিল্প উৎপাদন একটি গুরুত্বপূর্ণ যোগসূত্র। বর্তমানে, স্বয়ংক্রিয় ঢালাই সরঞ্জামের উপর গবেষণা গভীরতর এবং কংক্রিট হচ্ছে, যা বিভিন্ন ধরণের ঢালাই কাঠামোর উৎপাদনে এটি ব্যাপকভাবে ব্যবহৃত হয়।
স্বয়ংক্রিয় ঢালাই প্রক্রিয়ায়, ওয়েল্ডিং অ্যাসেম্বলি গ্যাপ ত্রুটির বুদ্ধিমান এবং ডিজিটাল যুক্তিসঙ্গত নিয়ন্ত্রণ একটি নির্দিষ্ট পরিমাণে, এই ভিত্তিতে, ওয়ার্কপিসের অবস্থানের পার্থক্য, ওয়ার্কপিস জয়েন্ট বিচ্যুতি এবং অন্যান্য বিষয়গুলিও বিবেচনা করতে হবে। অতএব, লেজার ওয়েল্ডিং সীম ট্র্যাকিং প্রযুক্তি ওয়েল্ডিং প্রক্রিয়ায় একটি গুরুত্বপূর্ণ ভূমিকা পালন করে।
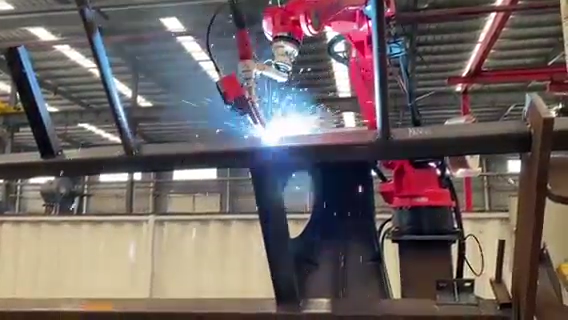
সিমেন্ট ট্যাঙ্ক গাড়ি গাড়ির বেস ঢালাই সাত অক্ষ পৃথিবী কক্ষপথ আট অক্ষ ঘূর্ণন লেজার ঢালাই সহ
-ওয়ার্কপিসের অবস্থান ব্যাপকভাবে পরিবর্তিত হয়
-ওয়ার্কপিস সংযোগে বিচ্যুতি বিদ্যমান
-উচ্চ ঢালাই নির্ভুলতা প্রয়োজন
- দুর্বল ঢালাই পরিবেশ এবং ধোঁয়া
এই ক্ষেত্রে, Yooheart বুদ্ধিমান রোবট HY1006A-145 লেজার ওয়েল্ডিং সীম ট্র্যাকিং সিস্টেমের সাহায্যে ওয়েল্ডিংয়ের জন্য ব্যবহৃত হয়, যার উচ্চ নমনীয়তা, স্থায়িত্ব এবং নির্ভরযোগ্যতা রয়েছে।
প্রতিটি ঢালাইয়ের আগে, সরঞ্জামগুলি প্রথমে ঢালাই সীমের স্থানাঙ্ক স্ক্যান করে এবং ওয়েল্ডিং সীমের অবস্থান নির্ধারণ করে, এবং তারপর অভ্যন্তরীণ অ্যালগরিদম দ্বারা স্থানাঙ্ক অফসেট গণনা করে এবং সময়ের প্রকৃত বিচ্যুতি সংশোধন করার জন্য রেফারেন্স স্থানাঙ্ক পরামিতিগুলিকে প্রকৃত সময়ে রাখে, যাতে ঢালাইয়ের পরে পণ্যের সিলিং এবং অখণ্ডতা নিশ্চিত করা যায়।
"চার বিন্দু ছেদ" পদ্ধতি
সকলের জানা মতে, দুটি বিন্দু একটি সরলরেখা নির্ধারণ করে, কিন্তু ওয়ার্কপিস সমাবেশ কোণ তৈরি করবে, প্রচলিত অ্যালগরিদম তার অবস্থান নির্ধারণ করতে অক্ষম, এর জন্য চারটায় "ছেদ" পদ্ধতি ব্যবহার করা প্রয়োজন, দুটি রেখা ছেদ করলে ছেদ বিন্দু তৈরি হয়, বিশেষ অ্যালগরিদম পরিচিত চারটি বিন্দু স্থানাঙ্ক নির্ধারণের মাধ্যমে ছেদ বিন্দু স্থানাঙ্কের অবস্থান গণনা করে, যাতে ঢালাইয়ের উদ্দেশ্য অর্জন করা যায়।

লেজার সীম ট্র্যাকিং সিস্টেম
লেজার ওয়েল্ডিং সিম ট্র্যাকিং সিস্টেমটি মূলত লেজার সেন্সর এবং মনিটরিং টার্মিনাল দ্বারা গঠিত। লেজার সেন্সরটি সক্রিয় অধিগ্রহণ এবং ওয়েল্ডিং সিমের তথ্য রিয়েল-টাইম প্রক্রিয়াকরণের জন্য ব্যবহৃত হয় এবং শিল্প রোবটগুলির সাথে রিয়েল-টাইম যোগাযোগ বজায় রাখে। মনিটরিং টার্মিনাল সেন্সরগুলি পর্যবেক্ষণ এবং কনফিগার করে। বুদ্ধিমান ওয়েল্ডিংয়ের চাহিদা পূরণের জন্য ওয়েল্ডিংয়ের আগে অবস্থান নির্ধারণ, ট্র্যাকিং এবং স্ক্যান করার কাজও এই সিস্টেমে রয়েছে।
কাজের নীতি: ওয়েল্ড সীম স্ক্যানিং, পয়েন্ট ক্লাউড ইমেজ ফিটিং, অ্যালগরিদম সঠিকভাবে বৈশিষ্ট্য পয়েন্টগুলি সনাক্ত করে এবং রোবটকে পাঠানো গণনার ফলাফলের রিয়েল-টাইম ডেটা নিয়ন্ত্রণ নির্দেশাবলীতে, রোবট অপারেশন পরিবর্তন বা নির্দেশিকা করে।
ঢেউতোলা প্লেট সমাধান

গোলাকার গর্ত স্বয়ংক্রিয় প্লাগ ঢালাই সমাধান

বৃত্তাকার সেলাই সমাধান

টিউবপ্লেট সমাধান
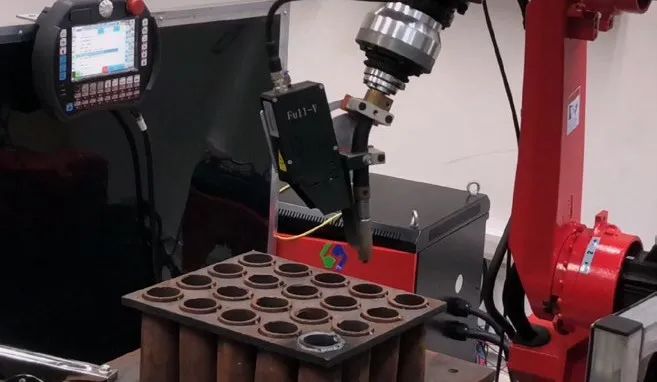
ইউনহুয়া ইন্টেলিজেন্ট দ্রুত স্থাপনা, নিরাপদ এবং দক্ষ অটোমেশন সমাধান এবং রিয়েল-টাইম সিস্টেম সমাধান প্রদান করতে পারে। লেজার ভিশন ওয়েল্ডিং সীম ট্র্যাকিং সিস্টেম ওয়েল্ডিং রোবটকে রিয়েল-টাইম ওয়েল্ডিং সীম লোকেটিং এবং ট্র্যাকিং উপলব্ধি করতে এবং ওয়েল্ডিং প্রক্রিয়ায় ওয়েল্ডিং সীম অফসেট অনুসারে ওয়েল্ডিং ট্র্যাজেক্টোরি সংশোধন করতে সক্ষম করে, যাতে প্রকৃত বুদ্ধিমান ওয়েল্ডিং উপলব্ধি করা যায়।
পোস্টের সময়: এপ্রিল-০৯-২০২২



